В настоящее время синхронные двигатели с возбуждением от постоянных магнитов (СДПМ) широко используются во многих отраслях промышленности. Они характеризуются низкими омическими потерями, высокой перегрузочной способностью, надежностью и простотой конструкции. Основное применение СДПМ находят в прецизионных, моментных сервоприводах позиционирования по данным датчика углового положения или линейного перемещения. В таких системах требуется быстродействующее регулирование электромагнитного момента в широком диапазоне частот вращения при сохранении высокой перегрузочной способности до пяти крат. Такие характеристики достигаются за счет регулирования величины моментообразующего тока, при стабилизации, на заданном уровне, магнитного потока в зазоре машины. Для синхронного двигателя составляющая тока, образующая момент, может быть определена в ортогональной системе координат вращающейся со скоростью ротора, поэтому в состав электропривода на базе СДПМ на ряду с преобразователем частоты, входит датчик углового положения ротора (ДПР). ДПР, как правило, реализуется как абсолютный энкодер на базе оптических или магнитных систем измерения углового положения, или вращающегося трансформатора типа револьвер, с дополнительными электронными системами возбуждения, демодуляции и оцифровки полезного сигнала положения. ДПР должен обеспечивать 12–16 разрядов точности определения углового положения при полосе пропускания не менее 1,5 кГц. Так как данные от датчика передаются по высокоскоростным цифровым линиям связи (интерфейсы SSI и BSSI) или при помощи высокочастотного (2-12 кГц) аналогового сигнала, то применение ДПР усложняет электропривод, и сужает область его возможного применения.
Однако, в настоящее время, c целью повышения энергоэффективности, ведущие производители, такие как Siemens, VEM, WEG и д.р. предлагают в простых частотно-регулируемых приводах, таких как в вентиляционное, насосное оборудование, электротранспорт и д.р. использовать СДПМ взамен асинхронных двигателей [1]. Энергоэфективность, в данном случае, достигается благодаря более высокой удельной мощности двигателя и более высокого КПД электропривода, особенно в режимах, когда нагрузка меньше номинальной, что, в том числе, позволяет отказаться от дополнительного принудительного охлаждения двигателя. В таких системах применение датчика положения ротора является излишним как с технической, так и с экономической точки зрения. Поэтому современные системы электропривода реализуют бездатчиковое управление, где положение ротора косвенно наблюдается по измеренным токам статора.
В связи с этим, к преобразователю частоты в составе электропривода с СДПМ предъявляются высокие требования. Необходимо не только регулировать частоту и амплитуду напряжения на выходе преобразователя по скалярному закону, но и реализовывать высокоскоростные, многоконтурные системы управления, наблюдатели координат состояния, обрабатывать датчик положения или скорости с различными интерфейсами, поддерживать скоростной информационный обмен с системой верхнего уровня. [2].
Всем этим требованиям вполне отвечают системы электроприводов, построенные на базе микропроцессорных преобразователей частоты МПЧ-380 производства ООО «НПФ «Новые Промышленные Технологии». НПФ предлагает линейку преобразователей для управления двигателями переменного тока в электроприводах специального назначения, в том числе для нужд оборонной промышленности, категория качества ВП в соответствии с НШПК.421214.001 ТУ. Преобразователи МПЧ-380 разработаны с применением отечественной компонентной базы. В силовой части используются современные IGВТ транзисторы 12-го и 16-го класса напряжения, что позволяет МПЧ-380 эффективно функционировать как в электросетях 220В 400Гц, так и в общепромышленных сетях 380В 50Гц. Система управления преобразователем построена на базе современного 32-х разрядного микроконтроллера 1986ВЕ91Т с ядром Cortex-M3 производства ППК «Миландр». Оригинальное программное обеспечение для микроконтроллера реализовано с применением специализированной математики с фиксированной точкой, что позволяет достичь высокой производительности вычислений при заданной точности. МПЧ-380 обладает набором современных интерфейсов – RS422/RS485 Modbus RTU, CAN. Для подключения датчика обратной связи предусмотрены гальванически развязанные интерфейсы SSI, квадратурного энкодера и резольвера. При работе с резольвером возбуждение, демодуляция и оцифровка углового положения происходит при помощи современного преобразователя угол-код 1310НМ025 ППК «Миландр». Дополнительно к МПЧ-380 может быть подключен датчик положения, установленный на выходе редуктора приводного механизма, и организовано управление по положению технологического объекта.
Таблица 1 – Характеристики преобразователей МПЧ-380
|
Наименование параметра |
Значение |
|
Входное напряжение |
380В /50 Гц , 220В /400 Гц |
|
Номинальная мощность |
0,75; 3.0; 5,5; 7,5; 11; 15; 30; 45; 60; 75; 100 кВт |
|
Выходное напряжение |
0-380 В |
|
Выходная частота |
0-500 Гц |
|
Частота ШИМ |
2-12 кГц |
|
Интерфейс управления |
RS422/RS485 Modbus RTU |
|
Количество дискретных входов/выходов |
8/8 |
|
Исполнение |
IP55 |
|
Температурный диапазон |
-40/+55 |
|
Профиль управления синхронным двигателем |
сервопривод, векторное без датчика |
|
Профиль управления асинхронным двигателем |
скалярное, прямое управление моментом |
|
Тормозной прерыватель |
Встроен |
|
Фильтр ЭМС |
Встроен |
МПЧ-380 обеспечивает управление моментом и скоростью СДПМ в векторном режиме с обратной связью по угловому положению ротора и без.
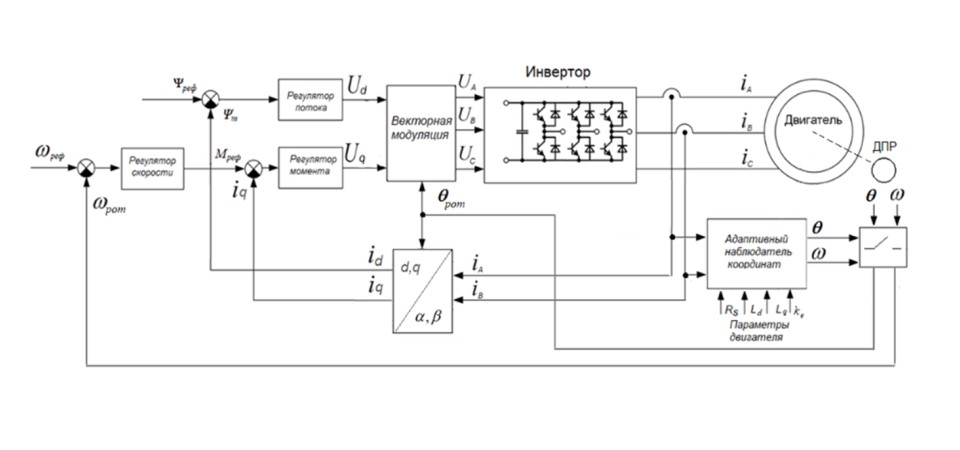
Рис. 3 Структурная схема векторного управления синхронным двигателем в МПЧ-380
Векторная система управления синхронным двигателем построена по принципу трех контурной системы автоматического управления с подчинённым регулированием. Входными данными для системы регуляторов являются проекции токов статора во вращающейся со скоростью ротора d-q системе координат. Продольная составляющая тока id, обеспечивает постоянство магнитного потока, ее значение поддерживается на заданном уровне регулятором потока, в зависимости от режима работы электропривода. Поперечная проекция тока iq пропорциональна моменту двигателя и управляется регулятором момента. Задание для регулятора момента может быть получено через последовательный интерфейс от системы управления верхнего уровня (СУВУ) или сформировано регулятором скорости. Скорость ротора косвенно вычисляется при обработки данных абсолютного энкодера следящим контуром. Это позволяет с высокой точностью оценить значение скорости ротора, сохранив при этом широкий диапазон полосы пропускания регуляторов системы управления. Задание для регулятора скорости может быть получено от СУВУ или сформировано регулятором положения на основе данных датчика положения ротора двигателя или датчика углового положения технологического объекта.
Управляющие воздействия для IGBT инвертора формируются, в блоке пространственно-векторной модуляции. Алгоритм переключения силовых ключей выбирается исходя из текущего теплового режима преобразователя, частоты вращения и нагрузки на двигатель. Это позволяет снизить коммутационные потери в инверторе [3], при сохранении приемлемого уровня пульсаций момента двигателя.
В бездатчиковом режиме угловое положения ротора двигателя косвенно вычисляется на основе измеренных токов статора и выходного напряжения инвертора. Алгоритм вычисления реализован с помощью адаптивного MRAS наблюдателя. В наблюдателе используется две модели, разные по структуре, но вычисляющие одну и ту же переменную состояния. В качестве опорной модели, используется сам управляемый двигатель [4]. В качестве настраиваемой модели используется модель синхронной машины в d-q системе координат (1).
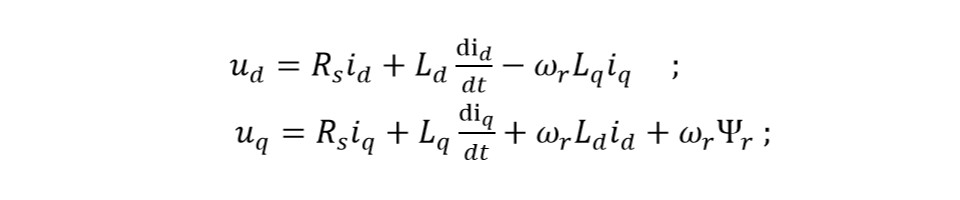 (1)
(1)
Ошибка, между d-q проекциями тока статора id,iq и вычисленными токами , , используется в алгоритме адаптации для вычисления угловой скорости (2).
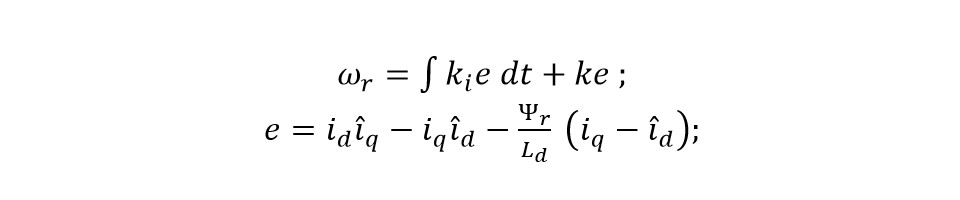
(2)
где Yr – потокосцепление ротора, Ld – индуктивность статора по оси d, Lq – индуктивность статора по оси q, Rs – сопротивление статора, wr – скорость ротора, ki – интегральный коэффициент наблюдателя, k – коэффициент усиления наблюдателя.
Адаптивный наблюдатель обеспечивает устойчивую работу электропривода в двигательном и генераторном режимах, плавный пуск, реверс, перегрузочную способность и регулирование скорости в диапазоне 1:25. Система устойчиво функционирует при различных возмущающих воздействиях: изменение параметров двигателя вследствие нагрева, нелинейность выходного напряжения инвертора, пульсации тока и момента. Переход в бездатчиковый режим управления и обратно возможен на «лету», без остановки и перезапуска алгоритма управления. Это повышает надежность системы при отказе датчика положения ротора, в сложных условиях эксплуатации.
Для старта, в бездатчиковом режиме, система управления не требует дополнительной информации о начальном положении ротора электродвигателя. Однако, при сложных условиях пуска, таких как малое время разгона, повышенный статический момент сопротивления на валу, может быть задействован алгоритм предстартового теста положения [5]. Алгоритм предстартового теста основан на регистрации величины пульсации тока на выходе инвертора при прикладывании к обмоткам двигателя вектора напряжения заданной величины и длительности. Сам ротор во время теста неподвижен, его принудительное выравнивание не требуется.
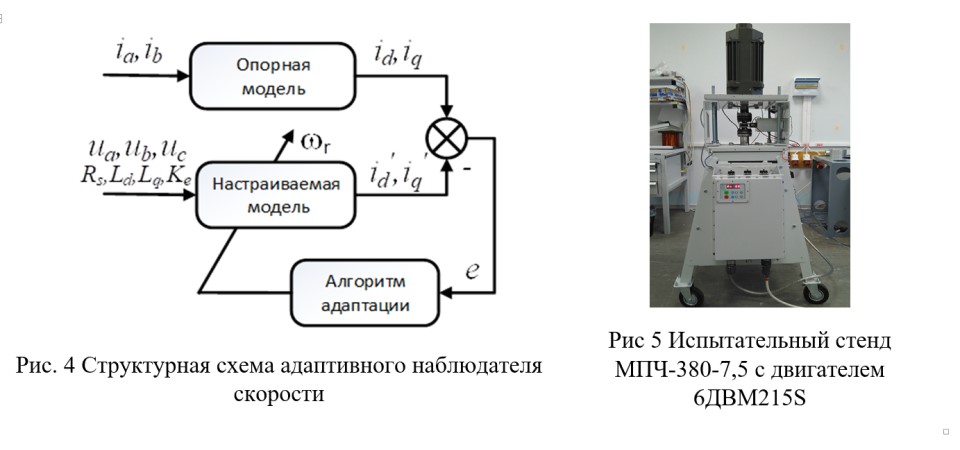
Результаты сравнительного анализа параметров системы управления в двух режимах представлены в таблице 2. Испытания проводились на стенде в состав которого входили два синхронных двигателя 6ДВМ215S производства ООО «ЧЭАЗ» тензометрическая муфта М40-150, для измерения скорости и момента, два МПЧ-380-7,5, система измерения электрической мощности и система сбора, анализа и визуализации данных. Нагрузка на валу создавалась с помощью одного из преобразователей, который управлял двигателем по датчику положения ротора, в генераторном режиме с ограничением момента. Генерируемая энергия рассеивалась на тормозном резисторе. Испытуемый МПЧ-380 функционировал в двигательном режиме с датчиком положения и без, при различных скоростях и моментах сопротивления на валу.
Таблица 1 – Сравнительные характеристики систем управления
|
Режим управления |
С датчиком положения |
Бездатчиковое управление |
|
Диапазон регулирования |
1:1000 |
1:25 |
|
Динамический отклик по моменту |
0.011 с |
0.07 с |
|
Задержка реакции по скорости |
0.013 с |
0.1 с |
|
Установившееся отклонение по моменту |
10% |
15% |
|
Точность поддержания скорости |
0.1% |
1% |
|
Момент на минимальной скорости |
150% |
30% |
|
Полоса пропускания контура момента |
250 Гц |
100 Гц |
|
Полоса пропускания контура скорости |
50 Гц |
20 Гц |
Таблица 2 – Параметры двигателя 6ДВМ215S
|
Наименование параметра |
Условное обозначение |
Значение |
|
|
Номинальная мощность |
PН |
7500 |
Вт |
|
КПД |
h |
95,1 |
% |
|
Номинальный момент |
M |
30 |
Нм |
|
Частота вращения |
n |
3000 |
об/мин |
|
Сопротивление статора |
Rs |
0,25 |
Ом |
|
Индуктивность по оси d |
Ld |
1,1 |
мГн |
|
Индуктивность по оси q |
Lq |
0,8 |
мГн |
|
Магнитный поток ротора |
Ke |
0,17 |
Вб |
|
Число пар полюсов |
p |
3 |
|
|
Инерция ротора |
J |
0,01 |
кгм2 |
Из таблицы 2 видно, что система управления с датчиком положения ротора более точна и обладает высоким быстродействием. Ухудшение характеристик в бездатчиковом режиме из-за нелинейности выходного напряжения инвертора обуславливает снижение динамических характеристик электропривода в целом.
В настоящее время электропривод на базе МПЧ-380 применен в ряде электроприводов специального назначения в составе опорно-поворотных устройств антенных систем. Так электропривод на базе МПЧ-380-7,5 и синхронного двигателя 6ДВМ215S успешно внедрен, взамен устаревшего электропривода постоянного тока с двигателем ДИ22. Из-за требований резервирования, а также ограничений, связанных с выбором элементной базы, предъявляемых заказчиком, использование встроенного датчика положения ротора, во всем диапазоне вращения было затрудненно. В связи с этим, было принято решение использовать сигнал датчика ОС только на низких оборотах, менее 100 об/мин, в остальном диапазоне частот электропривод работает в бездатчиковом режиме. Система функционирует таким образом, что переход от одного режима к другому не оказывает влияние на динамику внешнего контура управления положением. Заданная точность поддержания скорости и динамические характеристики электропривода обеспечиваются во всем диапазоне частот.
Преобразователи МПЧ-380 обладают полным набором функций, свойственных современным ПЧ: управление электромагнитным тормозом, задатчик интенсивности разгона и торможения, автоподхват скорости выбега, ПИ регулятор технологического параметра, управление по дискретным и аналоговым сигналам, работа со всеми типами датчиков положения и скорости, вспомогательное программное обеспечение для настройки и контроля параметров. МПЧ-380 являются полноценной заменой импортных устройств и могут быть применены в системах специального назначения в составе электроприводов с синхронными и асинхронными двигателями любых производителей. Необходимо подчеркнуть, что преобразователи являются полностью отечественной разработкой, с применением 100% отечественных комплектующих, оригинальным программным обеспечением. и в этом плане не имеют аналогов на российском рынке.
Литература
1. Bramerdorfer, G., Cavagnino, A., & Vaschetto, S. (2017). Cost-optimal machine designs fulfilling efficiency requirements: A comparison of IMs and PMSMs. 2017 IEEE International Electric Machines and Drives Conference (IEMDC).
2. Козярук А. Е., Рудаков В. В. «Современное и перспективное алгоритмическое обеспечение частото-регулируемых электроприводов», СПБЭК, г. Санкт-Петербург, 2002 г.
3. Shao-Liang An, Xiang-Dong Sun «Study on the Novel Generalized Discontinuous SVPWM Strategies for Three-Phase Voltage Source Inverters» IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 2, MAY 2013
4. Piippo A, Hinkkanen M, Luomi J. “Analysis of an Adaptive Observer for Sensorless Control of PMSM Drives,” 32ndAnnual Conference of Industrial Electronics Society, IECON2005. 6-10 Nov. 2005.
5. Yen-Chuan Chang, Ying-Yu Tzou, « A New Sensorless Starting Method for Brushless DC Motors without Reversing Rotation» 1-4244-0655-2/07/$20.00©2007 IEEE